
Origami
- Prénoms : Joseph, Clément, Sarah
Introduction :
Nous avons choisi de faire une tour rétractable et pilotable. Elle peut être utile pour faire des bras robot. Pour cela nous avons utiliser une technique en origami pour la tour, et une ou plusieurs poulies pour la guider.
Notre premier projet :
Nous étions parti sur un tout autre projet mais les très nombreuses difficultés rencontrées nous ont amenés à changer de sujet. Nous voulions réaliser dans un premier temps un robot qui se déplacer comme un guépard, c’est-à-dire grâce à l’extension puis a la contraction de son dos. Malheureusement, la soft robotique n’est pas très adapté pour réaliser des mouvements rapides.
Nous avons alors décidé d’essayer de faire une sorte de chenille, qui se déplace grâce à la rétraction et l’extension successives des parties de son corps. Nous avons donc envisagé dans un premier temps d’utiliser un ressort qui se contracte lorsqu’il est traversé par un courant électrique. Or nous n’avons pas trouvé de moyen de le décontracter sans que cela impacte les autres segments, et ainsi pourvoir lui permettre d’avancer. Nous avons aussi envisager d’utiliser des élastiques mais nous sommes là aussi arriver dans une impasse.
(pas de photos ni de vidéo de nos essais car ils constituaient à contracter et décontracter des ressorts ou des élastiques)
voici l’inspiration de notre première idée : https://youtu.be/Z5QAwAOxORo
voici ce que l’on voulait reproduire lorsque notre idée à évoluer : https://fr.vecteezy.com/video/2021025-une-chenille-marche-sur-bois
Projet final :
Nous sommes donc parti sur la fabrication d’un bras robot en origami.
Voici la vidéo qui nous a inspiré : https://www.youtube.com/watch?v=V3KMPQx92W8
 Nous avons donc commencer par fabriquer la tour. Pour cela nous avons suivi la vidéo ci-dessous :
Nous avons donc commencer par fabriquer la tour. Pour cela nous avons suivi la vidéo ci-dessous :
https://www.youtube.com/watch?v=w91rekGY1Rc
Nous avons utilisé du papier d’imprimante (90g/m^2) mais avec le recul, du papier plus dense aurait été mieux.
Nous avons donc réalisé les deux types de briques (Origami T pour les briques de base et Origami O pour fermer le haut et le bas). Voici par exemple la type T : Nous avons ensuite assembler les briques et fabriquer la tour complète (nous avons d’abord réaliser une tour plus petite puis, voulant réaliser des mouvements latéraux, nous l’avons agrandi, à l’étape où c’est précisé)
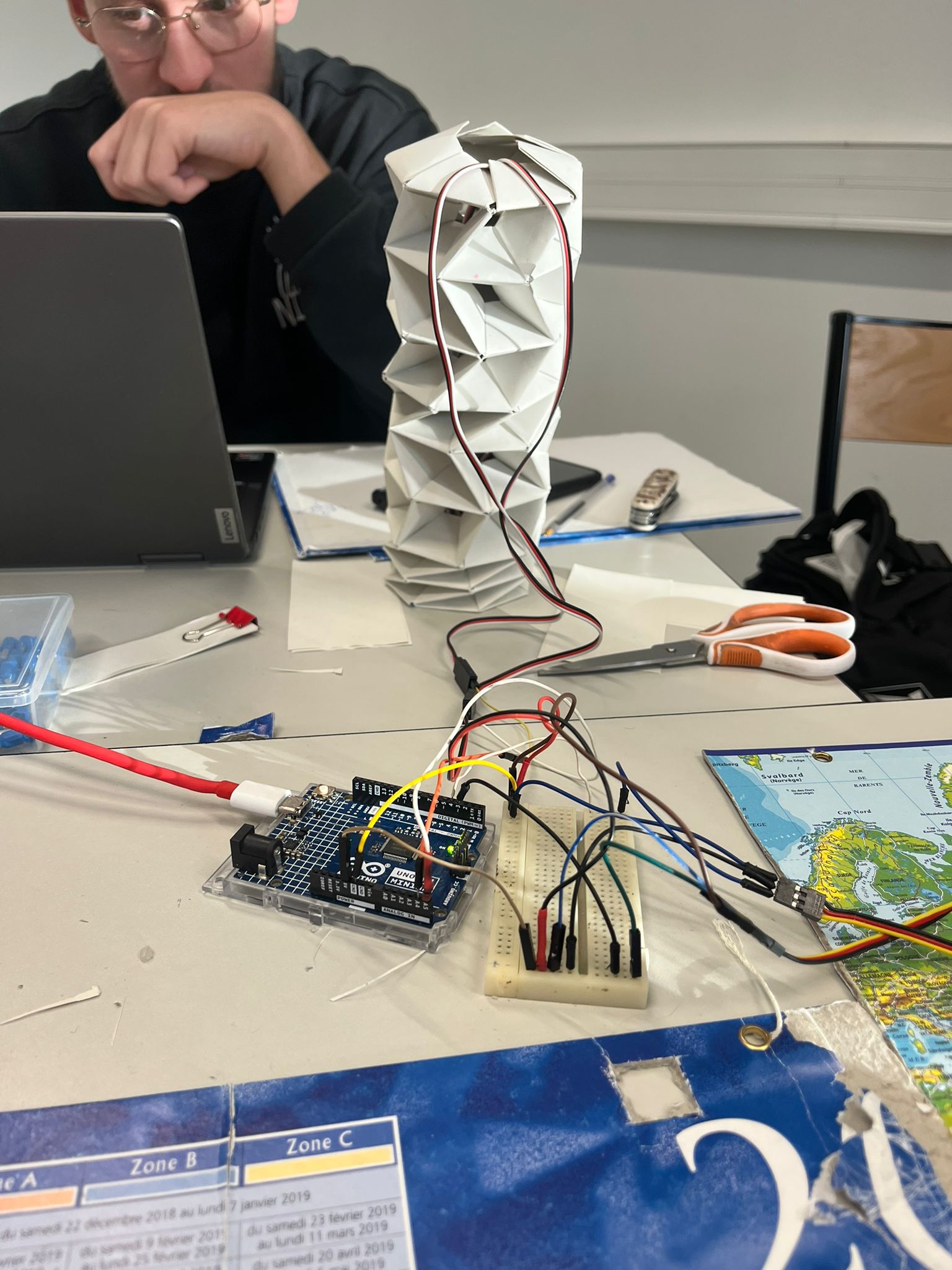
Nous avons ensuite assembler les briques et fabriquer la tour complète (nous avons d’abord réaliser une tour plus petite puis, voulant réaliser des mouvements latéraux, nous l’avons agrandi, à l’étape où c’est précisé)
 Nous avons ensuite décidé de tester de la rétracter grâce a un servo-moteur lié à une poulie. Nous avons utilisé un fil de pêche attaché à la base de la tour pour effectuer ce mouvement. En effet, lorsque la poulie tourne, elle enroule le fil, qui tire sur le bas de la tour, qui permet de la remonter.
Nous avons ensuite décidé de tester de la rétracter grâce a un servo-moteur lié à une poulie. Nous avons utilisé un fil de pêche attaché à la base de la tour pour effectuer ce mouvement. En effet, lorsque la poulie tourne, elle enroule le fil, qui tire sur le bas de la tour, qui permet de la remonter.
Nous avons utiliser le code Arduino ci-dessous :
#include <Servo.h>
// Création de l'objet Servo
Servo myServo;
// Définition de la broche de contrôle du servomoteur
const int servoPin = 3;
void setup() {
myServo.attach(servoPin); // Attache le servomoteur à la broche spécifiée
Serial.begin(9600); // Initialisation de la communication série
}
void loop() {
// Rotation en sens anti-horaire pendant 0,5 seconde
Serial.println("Rotation anti-horaire");
myServo.write(60); // Ajustez la valeur pour régler la vitesse
delay(1500); // Attendre 0.5 seconde
// Arrêt du servomoteur pendant 2 secondes
Serial.println("Pause");
myServo.write(93); // 90 = arrêt +- 3
delay(2000); // Attendre 2 secondes
// Rotation en sens horaire pendant 0,5 seconde
Serial.println("Rotation horaire");
myServo.write(120); // Ajustez la valeur pour régler la vitesse
delay(1500); // Attendre 0.5 seconde
// Arrêt du servomoteur pendant 2 secondes
Serial.println("Pause");
myServo.write(93); // 90 = arrêt
delay(2000); // Attendre 2 secondes
}
Nous avons décidé, dans un premier temps, de faire évoluer notre tour dans une structure lego (à droite, la structure vu du haut)


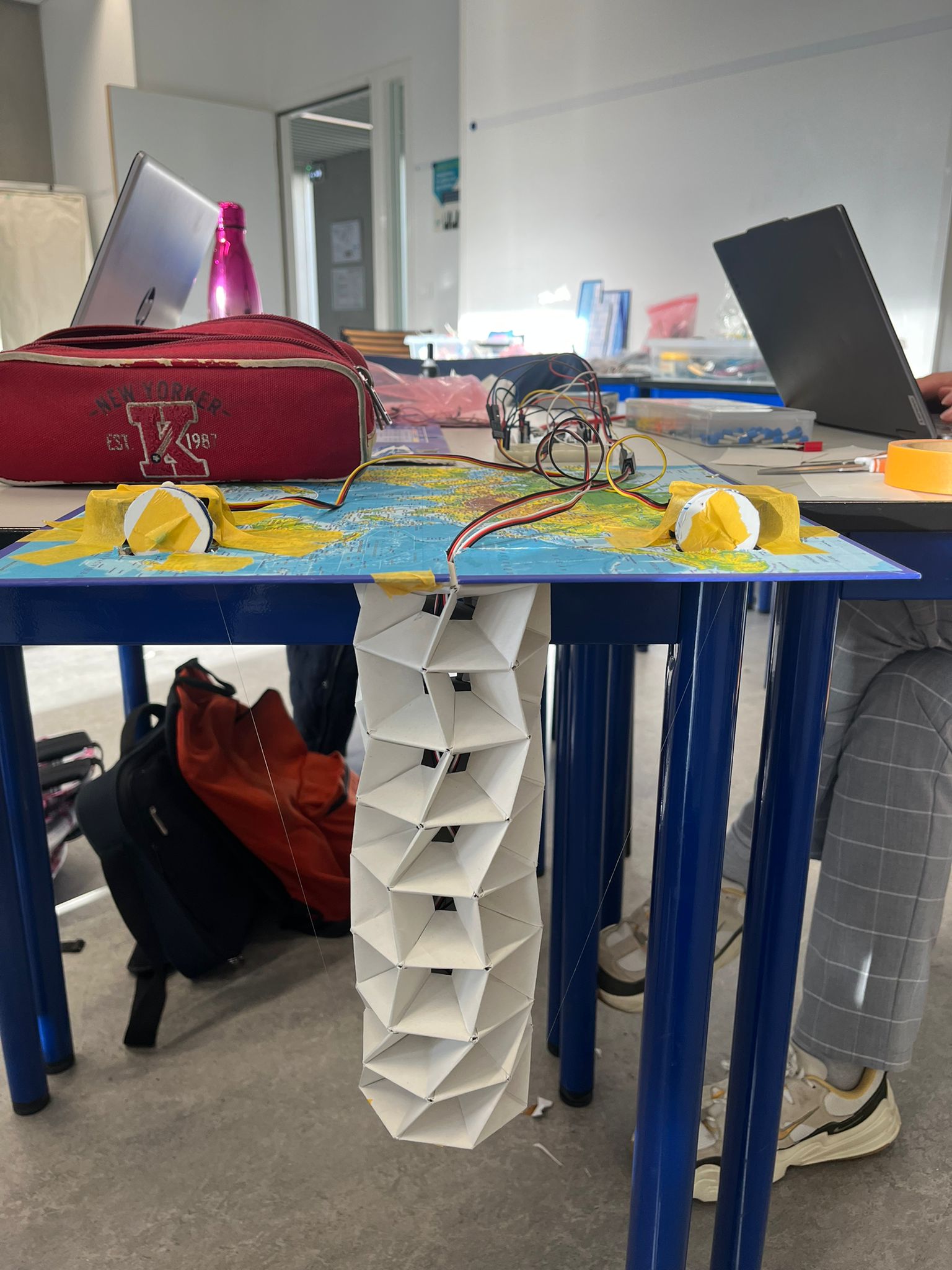
Or la structure était peu stable, et puisque nous avions décidé d’agrandir la tour, nous avons abandonné l’idée de la structure en lego, et décidés de seulement utilisé un carton que nous faisons dépasser de la table pour pouvoir faire pendre la tour.
Nous avons en effet décidé, que maintenant que la tour était rétractable, nous pouvions essayer de la faire tourner vers la droite et la gauche, et à terme dans toutes les directions. Nous avons donc agrandi la tour (pour que ce soit plus facile de réaliser le mouvement). Puis réaliser des poulies en carton car nous disposions que d’une seule poulie en plastique bleu, et nous avions besoin de deux pour pouvoir réaliser des mouvements latéraux.
Fabrication d’une poulie (après avoir coller les deux petits cercles, nous avons ajouter du scotch pour lisser la surface et éviter que le fil de pêche se coince) :



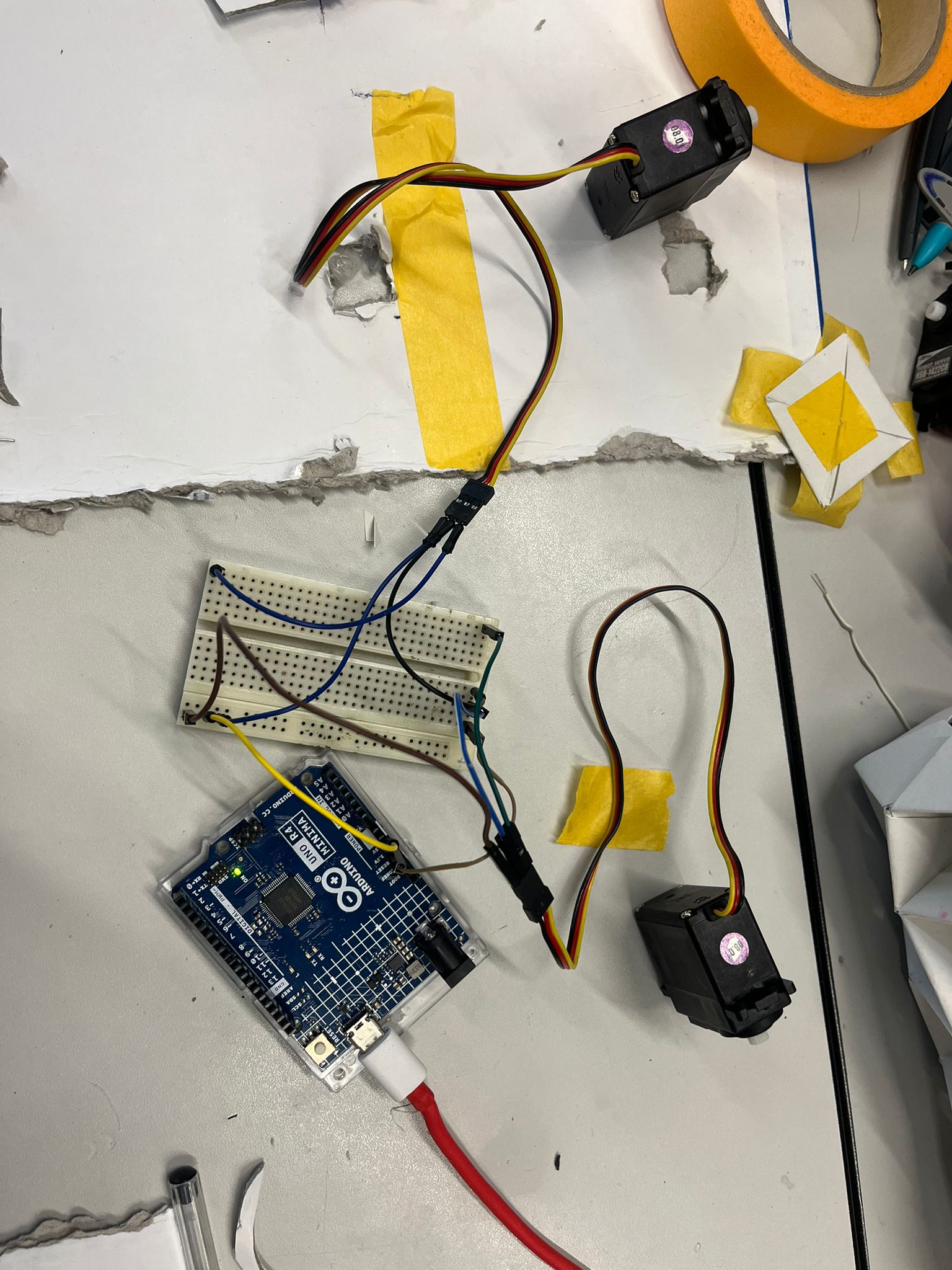
Une fois que nous avions nos deux poulies, nous avons réalisé le montage Arduino, alimentant les deux servo-moteurs : (le code Arduino utilisé est le même que ci-dessus)
 Nous avons ensuite décidé d’utiliser un capteur gyroscopique ( le GY-521), pour avoir la position précise de la base de la tour et pouvoir commander correctement le mouvement de celle-ci. Nous l’avons donc fixé à la base de la tour et branché comme le schéma ci-dessous (mais avec des fils beaucoup plus long pour qu’ils puissent traverser la tour) :
Nous avons ensuite décidé d’utiliser un capteur gyroscopique ( le GY-521), pour avoir la position précise de la base de la tour et pouvoir commander correctement le mouvement de celle-ci. Nous l’avons donc fixé à la base de la tour et branché comme le schéma ci-dessous (mais avec des fils beaucoup plus long pour qu’ils puissent traverser la tour) :
 Et voici le code Arduino que nous avons utilisé pour le gyroscope :
Et voici le code Arduino que nous avons utilisé pour le gyroscope :
#include "Wire.h"
#include "MPU6050.h"
MPU6050 mpu;
void setup() {
Wire.begin();
mpu.initialize();
Serial.begin(9600);
}
void loop() {
int16_t ax;
int16_t ay;
int16_t az;
int16_t gx;
int16_t gy;
int16_t gz;
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
Serial.print("Accel X: "); Serial.print(ax / 100);
Serial.print(" Accel Y: "); Serial.print(ay / 100);
Serial.print(" Accel Z: "); Serial.println(az / 100);
delay(250);
}
voici un site qui peut être utile pour comprendre le capteur gyroscope :
https://www.moussasoft.com/comment-utiliser-module-gy-521-arduino-uno-guide/#5-code-arduino-gy-521
Nous avons ensuite testé le capteur, et codé les moteurs pour qu’ils réagissent comme attendus (change de sens lorsque la tour est tordue tout à gauche ou tout à droite).

Nous avons fait les tests en dehors de la maquette, en faisant bouger l’orientation de la tour a la main et en regardant la réaction des moteurs.
Voici le code final pour l’Arduino :
#include <Servo.h>
#include "Wire.h"
#include <MPU6050.h>
MPU6050 mpu;
Servo myServo1;
Servo myServo2;
String sens;
const int servoPin1 = 3;
const int servoPin2 = 4;
void setup() {
Wire.begin();
mpu.initialize();
myServo1.attach(servoPin1);
myServo2.attach(servoPin2);
myServo2.write(95);
Serial.begin(9600);
}
void loop() {
int16_t ax, ay, az;
mpu.getAcceleration(&ax, &ay, &az);
float accelY = ay / 100.0;
Serial.print("Accel Y: "); Serial.println(accelY);
if (accelY > 100) {
myServo2.write(87);
sens = "GVM";
} else if (accelY < -100) {
myServo1.write(96);
sens = "DVM";
}
else if (accelY < 18 and accelY > 8) {
Serial.println(sens);
if (sens == "GVM") {
myServo1.write(88);
myServo2.write(92);
sens = "MVD";
} else if (sens == "DVM") {
myServo1.write(93);
myServo2.write(95);
sens = "MVG";
}
}
delay(100);
}
Mobilités que l’on a réussi à faire :


Difficultés rencontrées :
Nous avons eu des difficultés pour assembler les origamis, le manque de rigidité du papier nous a obligé a finalement utilisé de la colle pour maintenir les pièces ensemble.
Les poulies auraient été plus facile d’usage si on avait fait une différence de diamètre plus grande entre les deux cercles qui les composent, pour éviter que le fil sorte du guidage lorsqu’il est trop détendu.
Nous avons du faire à tâtons pour coder l’Arduino, plus car nous ne savions pas comment faire autrement, les valeurs utilisées devant être testés. Nous avons donc passés toutes une séance à perfectionner le dispositif.
Améliorations possibles :
Il aurait pu être intéressant d’imprimer les cellules en 3D afin d’obtenir quelque chose de plus souple et qui se déforment moins avec le temps (le papier s’habitue à être plier toujours dans le même sens).
Avec plus de temps, nous aurions voulu concevoir la pince à fixer au bout de la tour pour avoir un bras robot fonctionnel. Ou au moins un ballon, qui en le gonflant puisse saisir un gobelet.
Conclusion :
Lors de ce projet, nous n’avons pas rencontrés de difficultés majeures, seulement des problèmes d’emboitages des origamis permettant de constituer la tour, et quelques difficultés de stabilité du support en lego.
Ce projet nous a appris qu’en designant correctement la brique de base nous pouvions fabriquer des objets extrêmement flexibles, et relativement résistants. Nous avons aussi appris à admettre notre défaite lorsque trop de difficultés se présenter à nous (lors de notre premier projet notamment).